All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(376 produtos disponíveis)









































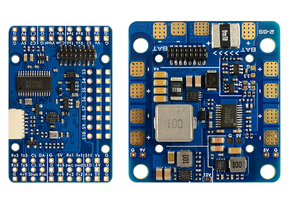















































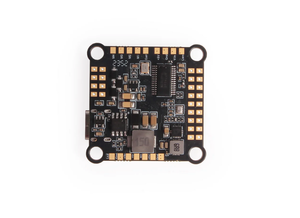






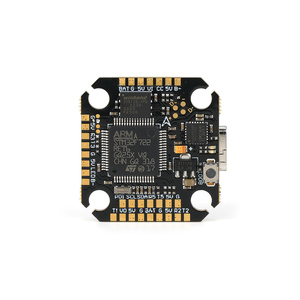













































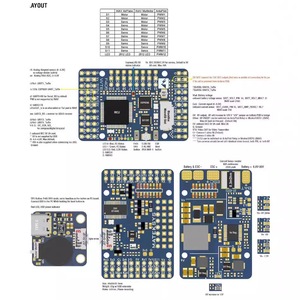








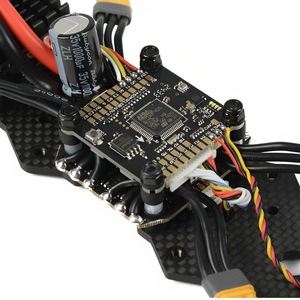













O controlador de voo Omnibus F4 é um componente crucial para fixar as trajetórias de voo em drones e outros veículos aéreos não tripulados (UAVs). Ele compreende vários tipos que operam com diferentes softwares:
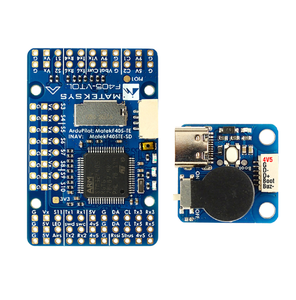
Omnibus F4 SD
O dispositivo possui um slot para cartão SD. Assim, as pessoas podem armazenar dados no cartão SD, sobre telemetria, logs de voo, dados da caixa preta e outros detalhes. Além disso, ele suporta uma ampla gama de firmwares, incluindo ArduPilot, Betaflight, iNav e Flightstack. Assim, os pilotos podem escolher aquele que melhor se adapta ao seu estilo de voo ou necessidades.
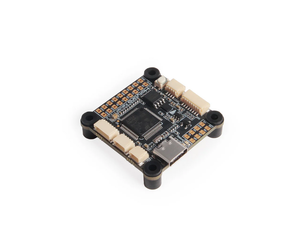
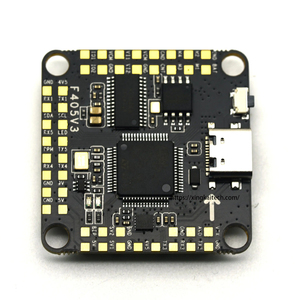
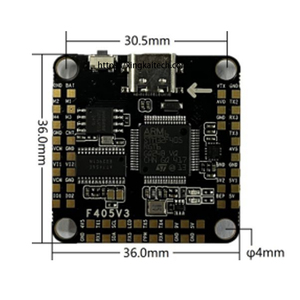
Omnibus F4 V3
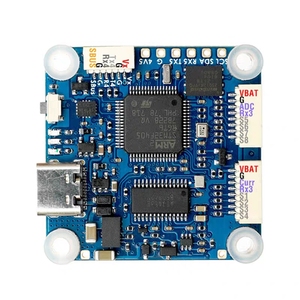
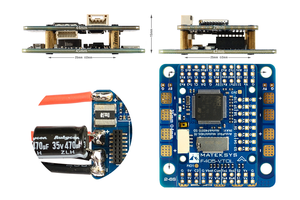
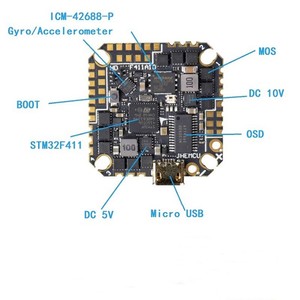
Este controlador de versão possui muitos sensores para posicionamento preciso do ângulo e controle de altitude. A IMU possui um sensor de acelerômetro que detecta a inclinação ao longo dos eixos X e Y e o movimento vertical no eixo Z. Ele também possui um giroscópio que mede a rotação em torno dos eixos X, Y e Z. Juntos, esses sensores permitem um controle estável em condições difíceis.
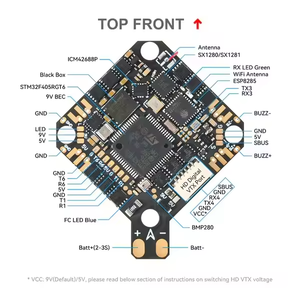
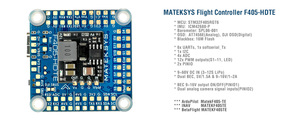
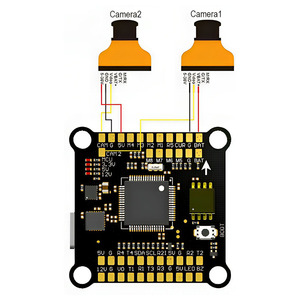
Omnibus F4 OSD
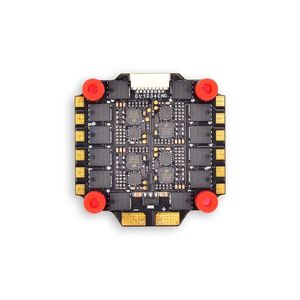
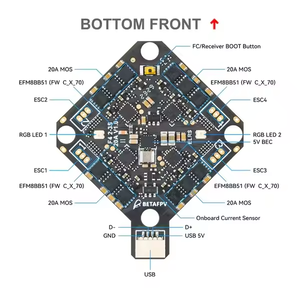
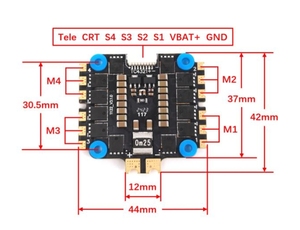
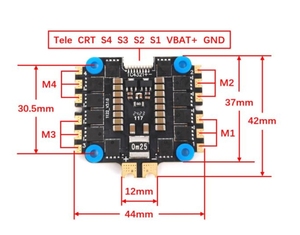
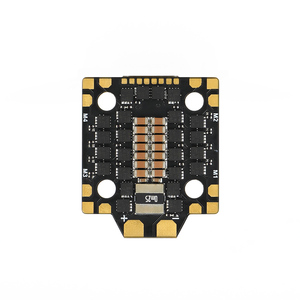
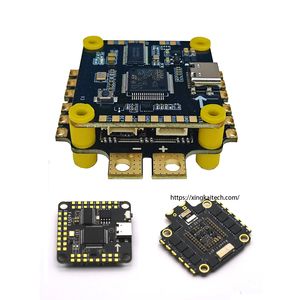
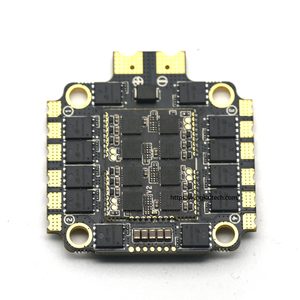
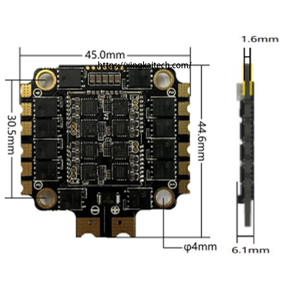
Muitos controladores de voo modernos, incluindo a versão Omnibus F4, possuem controladores eletrônicos de velocidade (ESCs) embutidos. Eles processam sinais do controlador de voo e regulam a velocidade do motor para garantir que o UAV se mova conforme planejado. Ter o ESC integrado ao controlador de voo minimiza o cabeamento entre os componentes. Também economiza espaço e peso no drone.
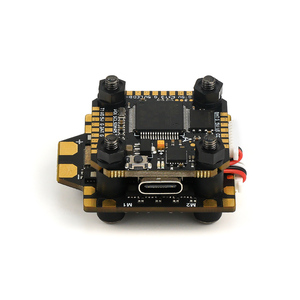
Omnibus F4 Pro
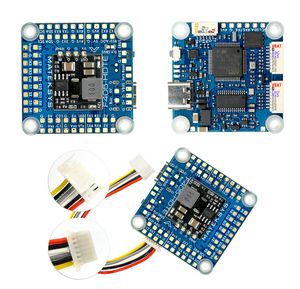
Este controlador de estilo superior possui sensores adicionais, como um magnetômetro, que ajudam a determinar e manter o rumo ou guinada do drone em voo. Os usuários podem optar por este controlador de voo avançado quando precisam de controle preciso de posição e orientação. Especialmente em modos de voo assistidos por GPS, logs, telemetria e dados de voo, a versão Pro pode ser usada para análise de dados e solução de problemas.
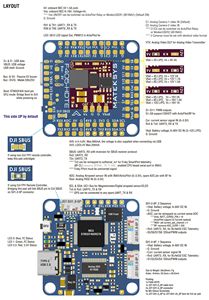
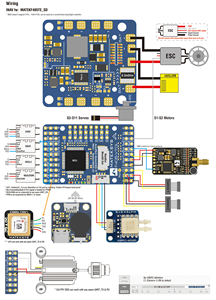
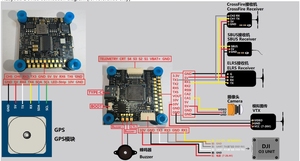
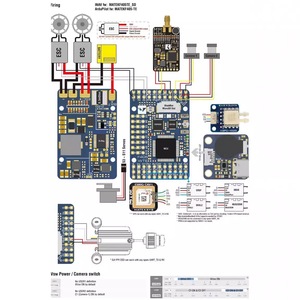
Receptor FrSky/SPEKTRUM/F.Port
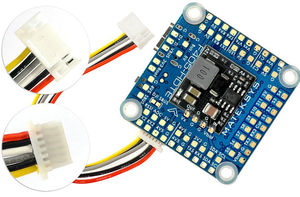
Existem muitos tipos de receptores, como o receptor FrSky, que usam o modo ACCESS ou D16 para fornecer dados de telemetria sobre a qualidade do sinal do receptor. O controlador de voo pode alternar entre F.RX para receptores FrSky e S.RX para receptores Spektrum. O uso de receptores de telemetria F.Port ou S.Port simplifica a conexão de telemetria entre o controlador de voo e o transmissor. Isso garante que o controlador de voo Omnibus receba dados em tempo real para melhorar o desempenho.
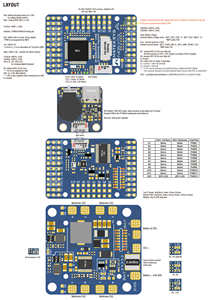
O controlador de voo Omnibus F4 é útil para drones, helicópteros RC e outras aeronaves modelo. Ele pode ter vários recursos que ajudam no controle de voo. Isso pode incluir um processador potente, integração de vários sensores, capacidade GPS, controle eletrônico de velocidade, configurações programáveis, telemetria e registro de dados, um fator de forma compacto e resistência a vibrações.
O controlador de voo ajuda a estabilizar o drone ou aeronave no ar. Ele ajusta os movimentos com base nas leituras dos sensores. Para fazer isso corretamente, o controlador depende de sensores em tempo real e uma IMU (Unidade de Medição Inercial) com acelerômetros e giroscópios de vários eixos. Esses dados de medição são usados para determinar a orientação e aceleração atuais da aeronave. Ele também pode ter um magnetômetro para melhor estabilização e controle de navegação.
Um processador potente garante o processamento rápido e preciso dos dados do sensor para um controle de voo estável. O processador OMNIBUS F4 pode ser um STM32-F407 com um ARM Cortex-M4 de 32 bits, que fornece memória e poder de processamento suficientes para algoritmos de voo complexos. Ele possui uma função GPS com um módulo UBlox Neo-M8N e outros recursos que auxiliam no posicionamento e navegação, como altitude hold, retorno para casa e waypoints autônomos.
O controle eletrônico de velocidade (ESC) é importante para o controle de velocidade variável de motores sem escova. Alguns controladores aéreos possuem ESCs embutidos com capacidade bidirecional que permitem que o motor gire em qualquer direção. Os controladores de motor sem escova são projetados para funcionar com motores sem escova para operação suave. Eles também possuem configurações programáveis para se adaptar às diferentes necessidades do motor ou aeronave.
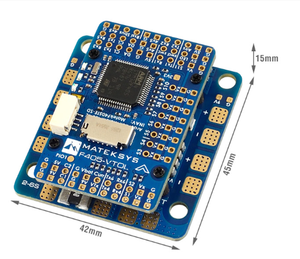
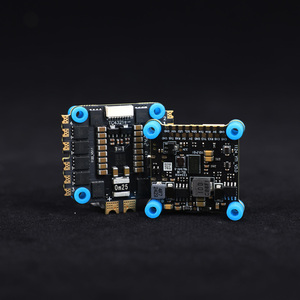
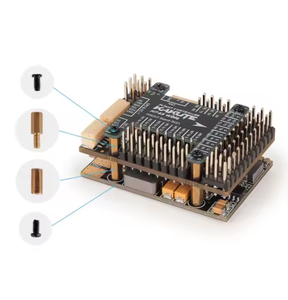
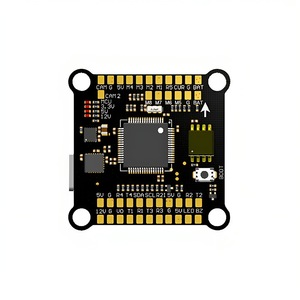
O controlador de voo possui um layout fácil de conectar com furos de montagem. Seu design compacto e leve minimiza o impacto no tamanho e peso geral da aeronave. Ele pode ter resistência a vibrações ou suportes de amortecimento para reduzir os efeitos das vibrações na precisão do sensor.
As várias aplicações do controlador de voo omnibus F4 incluem as seguintes;
P1: Meu drone precisa de um controlador de voo?
R1: Sim, cada drone precisa de um controlador de voo para pilotá-lo. O controlador de voo é como o cérebro do drone, interpretando a entrada do piloto e os dados do sensor para controlar o drone.
P2: Todos os controladores de voo são compatíveis com cada drone?
R2: Não, nem todos os controladores de voo são compatíveis entre si. Os controladores de voo Omnibus f4 vêm em diferentes modelos e configurações. Cada um é projetado para um tipo específico de configuração de drone e garante que todos os componentes funcionem perfeitamente.
P3: Como configurar e instalar o controlador de voo Omnibus F4?
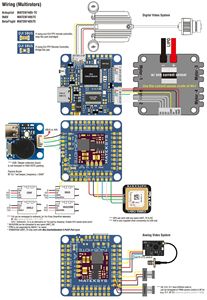
R3: O processo de instalação e configuração do controlador Omnibus F4 pode variar muito dependendo do modelo específico do controlador que está sendo usado e do tipo de drone que está sendo instalado. No entanto, em geral, o controlador pode ser montado no quadro com a porta USB voltada para fora, conectado à fonte de alimentação do drone e instalado no drone em uma posição que seja nivelada e segura. Uma vez instalado fisicamente no drone, o controlador é então configurado conectando-o a um computador e usando o programa de software para personalizar as configurações para garantir a instalação e funcionalidade adequadas. Consulte o manual do controlador de voo Omnibus para obter instruções de instalação e configuração específicas.
P4: Como saber se você precisa de um novo controlador de voo?
R4: Se um controlador de voo estiver com defeito ou danificado, pode ser difícil saber. Sinais como comportamentos de voo estranhos, movimentos erráticos ou até mesmo um controlador emitindo um sinal sonoro ou mostrando mensagens de erro podem indicar que algo está errado. Alguns controladores de voo avançados possuem ferramentas de autodiagnóstico que podem ajudar a determinar se o controlador está funcionando corretamente.