
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(1670 produtos disponíveis)


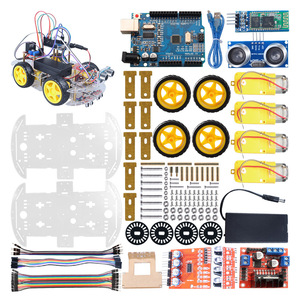




Um **robô Bluetooth para computador** é um robô que pode ser controlado sem fio por meio de um computador ou dispositivo móvel compatível com Bluetooth. Ele funciona conectando o dispositivo de controle ao robô por meio de uma rede Bluetooth. Isso permite que o usuário envie comandos e instruções para o robô em tempo real. As conexões Bluetooth têm um alcance limitado, o que as torna mais adequadas para aplicações onde o robô precisa ser operado a uma curta distância do dispositivo de controle. Alguns exemplos de robôs Bluetooth para computador incluem carros robóticos controlados por Bluetooth, robôs humanóides e braços robóticos. Esses robôs podem ser controlados para se mover, executar tarefas e exibir comportamentos realistas, entre outras coisas. Os principais componentes dos robôs Bluetooth incluem um microcontrolador, módulo Bluetooth, drivers de motor e sensores.
Os tipos de modelos de robôs incluem robôs seriais, cartesianos, polares e cilíndricos. Um robô serial, que é comumente chamado de robô industrial ou braço robótico cartesiano, possui seis juntas rotativas que são dispostas para se assemelhar a uma cadeia serial. As seis juntas giram todas em torno de um eixo vertical comum. As juntas podem ser controladas por meio de uma interface de computador e são programadas de uma maneira que permite que o braço robótico se mova em um sistema de coordenadas X, Y e Z. Como resultado, o robô serial é capaz de se mover suavemente e com precisão em qualquer direção dentro de um espaço tridimensional. Esse tipo de robô é normalmente usado em linhas de produção ou montagem para realizar tarefas repetitivas, como soldagem, coleta e colocação de objetos.
Os robôs cartesianos possuem componentes de braço que deslizam ao longo de trilhos lineares em um caminho reto. Os trilhos são montados em uma base posicionada que pode se mover horizontalmente. Um segundo braço desliza perpendicularmente ao primeiro, e um terceiro braço se estende verticalmente para adicionar movimento no eixo Z. Todos os três braços são operados por meio de um sistema de controle de computador. Como os movimentos são estritamente lineares, os robôs cartesianos são mais confiáveis do que os robôs seriais. Eles também são mais fáceis de programar e manter. Os robôs são frequentemente usados em aplicações que exigem posicionamento preciso e movimento de passada em espaços tridimensionais, como máquinas CNC, cortadores a laser, impressoras 3D e estações de montagem.
Os robôs polares possuem um braço que é composto por três juntas rotativas dispostas para se assemelhar a um ancinho. As juntas giram em torno de eixos perpendiculares e se estendem ou retraem radialmente. Isso permite que o robô se mova em um movimento circular dentro de um envelope de trabalho cilíndrico. Os robôs polares são mais adequados para uso em linhas de montagem que exigem levantamento pesado e possuem espaços de trabalho com formas semi-esféricas. Eles podem realizar essas tarefas a um custo menor e com menos variações de movimentos em comparação com os robôs seriais.
Outro tipo de robô é o robô cilíndrico. Ele possui um braço com duas juntas rotativas e um punho de movimento paralelo. A primeira junta gira em torno de um eixo vertical, enquanto a segunda se estende e retrai radialmente. O punho é então movido para cima e para baixo usando a terceira junta. Isso dá ao robô a capacidade de se mover em um envelope de trabalho cilíndrico. Os robôs cilíndricos podem realizar tarefas de montagem e atendimento de máquinas em espaços confinados. Eles têm um design simples e são fáceis de usar. Seus envelopes de trabalho podem ser facilmente ajustados para acomodar diferentes aplicações.
O tipo de robô também pode ser determinado por modelos de rodas. Exemplos incluem robôs com direção diferencial inteligente, omnidirecionais, Ackerman e mecanum. Os robôs com direção diferencial inteligente possuem duas rodas montadas em um eixo comum. As rodas podem girar independentemente e variar em velocidade para direcionar o robô. O design permite alta manobrabilidade e a capacidade de virar no lugar. Esses robôs são principalmente usados em ambientes dinâmicos, como armazéns e plantas de fabricação. Eles são projetados para operar em ambientes complexos e podem se adaptar a condições em constante mudança.
Os robôs omnidirecionais possuem rodas que podem se mover em qualquer direção. O design permite a translação e rotação simultâneas do robô. Os robôs omnidirecionais são mais fáceis de manobrar e virar em espaços apertados. Eles podem ser movidos suavemente e com precisão em qualquer direção. Isso os torna muito adequados para uso em aplicações que exigem manobrabilidade extensa e posicionamento preciso, como limpeza de pisos.
Os robôs com direção Ackerman, por outro lado, direcionam as rodas dianteiras enquanto as rodas traseiras são fixas. As rodas são dispostas de forma que possam virar em ângulos diferentes para reduzir o raio de giro do robô. Isso aumenta a capacidade do robô de navegar por espaços apertados. Os robôs com direção Ackerman são frequentemente usados para viagens de longa distância ou em aplicações que exigem curvas fechadas.
Os robôs com direção mecanum possuem rodas que podem mover o robô em qualquer direção. Cada roda consiste em um conjunto de rolos que são montados em um ângulo de 45 graus. Esse design permite o movimento omnidirecional. Os robôs são fáceis de controlar e podem virar suavemente. Eles são comumente usados em docas de carregamento, estações de montagem e robôs de serviço.
Os mecanismos usados para classificar robôs incluem robôs articulados, paralelos e SCARA. Os robôs articulados possuem juntas rotativas que podem dobrar, torcer e girar. Isso lhes confere um alto grau de flexibilidade e os torna adequados para uso em espaços confinados. Eles podem trabalhar com formas complexas e realizar tarefas como manuseio de materiais, montagem e manutenção de máquinas. Os robôs articulados são frequentemente usados nas indústrias automotivas. Eles possuem várias vantagens, incluindo longo alcance, versatilidade e força. Os robôs podem ser mantidos e reparados com facilidade. Suas juntas também são facilmente acopladas ou desacopladas.
Os robôs paralelos possuem braços com atuadores lineares simultâneos que são interligados em uma disposição paralela. Eles fornecem suporte para uma ferramenta ou efetor final que é conectado a uma base fixa. O design permite que os robôs se movam com alta velocidade e precisão. Os robôs paralelos são ideais para aplicações que exigem posicionamento preciso e resposta rápida. Eles podem ser usados para classificação, coleta e tradução de peças em linhas de montagem. Os robôs possuem menos peças móveis, o que os torna menos propensos a desgaste. Eles também possuem um sistema de controle de computador fácil de usar.
Os robôs SCARA possuem dois braços rotativos paralelos. Os braços podem se mover horizontalmente em tandem e possuem uma terceira junta que fornece movimento vertical. O design permite o movimento horizontal em uma área de trabalho cilíndrica. Os robôs SCARA são principalmente usados em tarefas de montagem que exigem colocação rápida e precisa de componentes em um único plano horizontal.
Os usuários podem facilmente distinguir entre robôs Bluetooth por seu modelo de chassi. Esses incluem robôs aranha, de esteira, com direção diferencial, de base fixa e móveis. Os robôs aranha possuem rodas que são habilitadas para girar em todas as direções por um conjunto de juntas de perna interligadas. A rotação coordenada permite que o robô se mova sobre obstáculos e terrenos acidentados. Os robôs aranha conseguem imitar de perto a forma como as aranhas reais se movem. Eles podem contornar espaços apertados e áreas que possuem obstáculos com facilidade. Isso os torna adequados para uso em missões de busca e salvamento, exploração e ambientes perigosos.
Os robôs de esteira possuem esteiras contínuas ou esteiras que são compostas por segmentos interligados. Esses segmentos podem se mover de forma coordenada para impulsionar o robô sobre terrenos irregulares. O design fornece ao robô estabilidade e mobilidade aprimorada, o que facilita a travessia de obstáculos, terrenos acidentados e pisos oleosos ou arenosos. Os robôs de esteira são comumente usados em aplicações de construção, militares e agricultura. Eles podem trabalhar em condições adversas e chegar a áreas de difícil acesso.
Os robôs com direção diferencial possuem duas rodas motrizes montadas em um eixo comum. Eles permitem que o robô direcione variando a velocidade e direção de cada roda. O design confere aos robôs com direção diferencial um raio de giro apertado. Eles são capazes de virar em um espaço pequeno com facilidade.
Os robôs de base fixa possuem um braço que é montado em uma base estacionária. O braço pode ser estendido ou retraído, mas não girado. Isso permite que o robô execute movimentos precisos. Os robôs de base fixa são normalmente usados em aplicações que exigem posicionamento preciso e consistente, como inspeção e teste. Eles possuem um design compacto, o que os faz ocupar menos espaço.
Os robôs móveis consistem em um corpo que pode ser movido de um ponto a outro. Eles são normalmente equipados com sensores que os ajudam a detectar e evitar obstáculos durante a navegação. O design permite que os robôs cubram grandes áreas e realizem tarefas em ambientes dinâmicos.
Ao comprar robôs Bluetooth para PCs, os compradores buscam robôs que possuem recursos que simplificam suas operações. Os principais recursos dos robôs Bluetooth para computador incluem;
Interface Homem-Máquina (MMI)
A interface homem-máquina garante que haja uma comunicação suave entre o robô e os usuários. Uma parte vital da MMI é o teclado, que permite que os usuários definam vários parâmetros para o robô. A tela sensível ao toque também permite que os usuários obtenham dados em tempo real sobre as operações do robô. Na tela, os usuários podem monitorar o status operacional, selecionar o modo de operação e acompanhar o número de tarefas concluídas.
O joystick é um componente essencial da MMI. Ele é usado para controlar o movimento dos robôs em caso de intervenção manual.
Bluetooth
Um robô para PC com Bluetooth pode funcionar em um ambiente sem fio e dentro de um alcance de 10 metros. A conectividade sem fio elimina a necessidade de cabos e garante operações limpas em vários ambientes, como escritórios e casas.
Sensores de Navegação
Para que um robô execute tarefas de forma eficaz, ele precisa de navegação inteligente. Isso é possível por meio de uma combinação de sensores ultrassônicos e infravermelhos. Os sensores detectam obstáculos no ambiente e ajudam o robô a navegar ao redor deles. Ao usar o robô à noite, os sensores infravermelhos funcionam bem em condições de pouca luz.
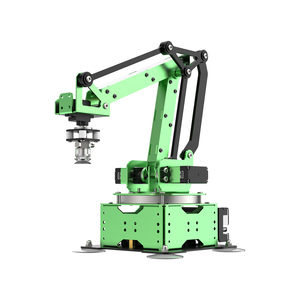
Braço de Trabalho
O braço de trabalho de um robô Bluetooth para computador executa todas as tarefas físicas. Seu design e comprimento variam de acordo com a natureza das tarefas a serem executadas. Robôs com braços mais longos podem alcançar grandes distâncias, enquanto aqueles com braços mais curtos são ideais para tarefas em um alcance próximo. Além disso, os braços com design articulado são mais versáteis e podem se mover com mais facilidade do que aqueles com estrutura reta.
Estação de Carregamento
A estação de carregamento fornece energia para robôs autônomos, o que permite que eles executem tarefas continuamente. Alguns robôs retornam às estações de carregamento automaticamente quando a tarefa é concluída ou quando o nível da bateria está baixo.
Comunicação Sem Fio
Além da conectividade Bluetooth, alguns robôs fornecem conectividade Wi-Fi. Os usuários podem monitorar remotamente as operações do robô por meio de um computador ou smartphone. A conectividade Wi-Fi é útil em aplicações onde a transferência de dados em tempo real é necessária.
Os robôs Bluetooth para computador podem ser usados em várias aplicações. Da educação ao entretenimento, as possibilidades são infinitas.
Saúde
Os robôs para computador podem acompanhar os sinais vitais do paciente. Eles também podem fazer outros exames de rotina. Alguns robôs de cuidados com pacientes até possuem conectividade Bluetooth. Isso permite que a equipe de saúde acesse os dados dos pacientes em tempo real.
Fabricação
Na fabricação, os robôs para computador podem realizar tarefas repetitivas. Essas tarefas podem incluir montagem, soldagem, pintura e embalagem. Seus computadores lhes dão a capacidade de trabalhar com precisão e se adaptar a diferentes ambientes de trabalho. Alguns robôs industriais possuem sensores Bluetooth para monitorar seus sistemas e condições de trabalho. Fazer isso ajuda os fabricantes a saber quando o robô precisa de manutenção.
Educação
Os robôs são um valioso auxílio para o aprendizado. Eles podem ajudar os alunos a entender conceitos complexos em matemática, codificação, tecnologia e ciência. Sua natureza interativa torna o aprendizado muito mais emocionante. Os professores podem conectar o computador ao robô via Bluetooth. Isso incentiva o aprendizado prático e uma melhor interação aluno-robô.
Patrulha de Segurança
O desenvolvimento de robôs de patrulha de segurança mudou completamente a indústria de segurança. Esses robôs podem se mover por uma determinada área e acompanhar qualquer atividade suspeita. Seus sistemas de computador possuem câmeras, mapeamento GPS e detecção de obstáculos. O pessoal de segurança pode se conectar ao robô por meio de Bluetooth para adquirir dados em tempo real.
Entrega
Em áreas urbanas, os robôs de entrega podem fazer entregas em parques, shoppings e até na porta das pessoas. Eles podem ser rastreados e controlados por meio da conectividade Bluetooth.
Entretenimento
Robôs com computadores e Bluetooth podem servir como consoles de jogos móveis. Por exemplo, robôs de controle remoto podem ser conectados a smartphones ou laptops. As pessoas podem então controlar o robô e jogar vários jogos.
Monitoramento do Ambiente
Alguns robôs podem ajudar a monitorar as condições ambientais, como qualidade do ar, temperatura, umidade e nível de ruído. Os dados podem ser transferidos para um computador via Bluetooth. Esses robôs são frequentemente usados em pesquisa e planejamento urbano.
Os compradores corporativos precisam levar em consideração as necessidades de seus clientes ao escolher robôs Bluetooth para computadores. Algumas tarefas podem precisar de robôs Bluetooth para computador com mais recursos, enquanto outras podem preferir o básico. Entender o mercado-alvo pode ajudar os compradores a escolher robôs que atendam às necessidades de seus clientes.
Concentre-se em marcas e fabricantes conhecidos por produzirem robôs Bluetooth para computador de qualidade. Esses fornecedores têm menos probabilidade de vender produtos de qualidade inferior ou mal feitos que podem prejudicar os negócios de seus clientes. Além disso, a compra de tais marcas pode dar aos compradores corporativos tranquilidade. Eles também podem ter cobertura em caso de defeitos no produto.
Investigue potenciais fornecedores e como eles respondem a reclamações e sugestões dos clientes. Selecione fornecedores com avaliações positivas que mostrem que eles vendem produtos de qualidade. Esse feedback também pode revelar a confiabilidade do fornecedor. Verifique também o tempo que o fornecedor trabalha na produção de robôs Bluetooth para computador. Mais anos significam mais experiência no campo.
Os compradores podem precisar de diferentes tipos de robôs Bluetooth para computador para atender às diversas necessidades dos clientes. Por exemplo, alguns clientes podem preferir um robô Bluetooth com teclado completo, enquanto outros querem uma versão compacta. Oferecer diferentes tipos aumenta a chance de receber mais pedidos.
Considere o preço de vários fornecedores de robôs Bluetooth para computador. Isso pode ajudar os compradores a obter preços justos e melhores margens de lucro. No entanto, não escolha apenas um fornecedor porque ele tem os preços mais baixos. Certifique-se de que seus preços estejam em linha com a qualidade do produto e de que eles mantenham um equilíbrio entre custos e qualidade. Estudos mostram que empresas que tentam manter custos baixos acabam tendo custos de alta qualidade. Eles podem acabar gastando mais para manter os clientes felizes.
Estimar os pedidos antes de escolher um fornecedor pode ajudar os compradores a determinar quantidades mínimas de pedido. Alguns fornecedores podem exigir pedidos em massa para reduzir os custos de produção. Eles também podem oferecer descontos para pedidos em massa. Por outro lado, os compradores precisam descobrir se pedir robôs em quantidades menores não afetará seus lucros ou levará à falta de estoque.
P: Um robô Bluetooth para computador funcionará com qualquer computador?
R: Embora um robô Bluetooth para computadores possa teoricamente funcionar com qualquer computador, o emparelhamento e a funcionalidade bem-sucedidos dependem da compatibilidade do computador com a tecnologia Bluetooth. Além disso, o emparelhamento bem-sucedido também depende da capacidade do usuário de navegar pelos procedimentos de configuração do robô Bluetooth. Portanto, para usar um robô Bluetooth para computador, o usuário deve garantir que seu computador seja compatível com Bluetooth. Se não for, eles podem comprar um dongle Bluetooth para substituir sua tecnologia Bluetooth existente. De qualquer forma, é necessário navegar pelos procedimentos de configuração com sucesso para garantir que o computador e o robô possam ser emparelhados com sucesso.
P: Um robô Bluetooth para computador pode ser usado com vários dispositivos simultaneamente?
R: Alguns robôs Bluetooth para computador permitem conectividade a vários dispositivos simultaneamente. No entanto, a conexão simultânea depende do modelo e da especificação do robô. Portanto, os usuários devem consultar o manual do fabricante e as diretrizes de especificação para determinar se podem conectar seu robô a vários dispositivos ao mesmo tempo.
P: Qual é o alcance de um robô Bluetooth para computador?
R: O alcance típico para tecnologia Bluetooth é geralmente dentro de 10 metros ou 33 pés. No entanto, fatores ambientais como obstáculos, interferência de outras tecnologias sem fio e até mesmo a versão específica da tecnologia Bluetooth que está sendo usada podem afetar o alcance. Se os usuários desejam obter uma conexão de longo alcance, podem considerar o uso de um amplificador de sinal Bluetooth ou adotar a versão mais recente da tecnologia Bluetooth. Os usuários devem, no entanto, observar o ambiente em que o robô será usado. Dependendo do ambiente, o alcance pode diferir do padrão de 10 metros ou 33 pés.















